











ΦΣΝ÷ΜΊ ’ΈςΟ≈Ή”plcœ‘ ΨΤΝ ΦΣΝ÷ΜΊ ’ΈςΟ≈Ή”plcœ‘ ΨΤΝ
ΝΣœΒ»ΥΘΚ≥¬Ϋή ¥Ϊ’φΘΚ021-57822082 24–Γ ±Ή…―·»»œΏΘΚ17301746287 ΙΛΉςQQΘΚ2179532262 ΒγΜΑΘΜ021-60481187

≤ΔΝΣΜζΤς»Υ
÷–ΈΡΟϊ≤ΔΝΣΜζΤς»Υ ΆβΈΡΟϊParallel robotΦρ ≥ΤPM

▪ Ζ÷άύ 1≤ΔΝΣΜζΙΙΘ®Parallel MechanismΘ§Φρ≥ΤPMΘ©Θ§Ω…“‘Ε®“εΈΣΕ·ΤΫΧ®ΚΆΕ®ΤΫΧ®Ά®Ιΐ÷Ν…ΌΝΫΗωΕάΝΔΒΡ‘ΥΕ·Ν¥œύΝ§Ϋ”Θ§ΜζΙΙΨΏ”–ΝΫΗωΜρΝΫΗω“‘…œΉ‘”…Ε»Θ§«““‘≤ΔΝΣΖΫ Ϋ«ΐΕ·ΒΡ“Μ÷÷±’ΜΖΜζΙΙΓΘ
2≤ΔΝΣΜζΤς»ΥΚΆ¥ΪΆ≥Ι˓”ϥ°ΝΣΜζΤς»Υ‘Ύ’ή―ß…œ≥ Ε‘ΝΔΆ≥“ΜΒΡΙΊœΒΘ§ΚΆ¥°ΝΣΜζΤς»Υœύ±»ΫœΘ§≤ΔΝΣΜζΤς»ΥΨΏ”–“‘œ¬ΧΊΒψΘΚ
Θ®1Θ©ΈόάέΜΐΈσ≤νΘ§ΨΪΕ»ΫœΗΏΘΜ
Θ®2Θ©«ΐΕ·ΉΑ÷ΟΩ…÷Ο”ΎΕ®ΤΫΧ®…œΜρΫ”ΫϋΕ®ΤΫΧ®ΒΡΈΜ÷ΟΘ§’β―υ‘ΥΕ·≤ΩΖ÷÷ΊΝΩ«αΘ§ΥΌΕ»ΗΏΘ§Ε·Χ§œλ”ΠΚΟΘΜ
Θ®3Θ©ΫαΙΙΫτ¥’Θ§Η’Ε»ΗΏΘ§≥–‘ΊΡήΝΠ¥σΘΜ
Θ®4Θ©Άξ»ΪΕ‘≥ΤΒΡ≤ΔΝΣΜζΙΙΨΏ”–ΫœΚΟΒΡΗςœρΆ§–‘ΘΜ
Θ®5Θ©ΙΛΉςΩ’ΦδΫœ–ΓΘΜ
ΗυΨί’β–©ΧΊΒψΘ§≤ΔΝΣΜζΤς»Υ‘Ύ–η“ΣΗΏΗ’Ε»ΓΔΗΏΨΪΕ»Μρ’Ώ¥σ‘ΊΚ…ΕχΈό–κΚή¥σΙΛΉςΩ’ΦδΒΡΝλ”ρΡΎΒΟΒΫΝΥΙψΖΚ”Π”Ο
3
1978ΡξΘ§Hunt Ή¥ΈΧα≥ωΑ―ΝυΉ‘”…Ε»≤ΔΝΣΜζΙΙΉςΈΣΜζΤς»Υ≤ΌΉςΤςΘ§”…¥Υά≠ΩΣ≤ΔΝΣΜζΤς»Υ―–ΨΩΒΡ–ρΡΜΘ§ΒΪ‘ΎΥφΚσΒΡΫϋ10ΡξάοΘ§≤ΔΝΣΜζΤς»Υ―–ΨΩΥΤΚθΆΘ÷Ά≤Μ«ΑΓΘ÷±ΒΫ80Ρξ¥ζΡ©90Ρξ¥ζ≥θΘ§≤ΔΝΣΜζΤς»Υ≤≈“ΐΤπΝΥΙψΖΚΉΔ“βΘ§≥…ΈΣΙζΦ ―–ΨΩΒΡ»»ΒψΓΘ
‘ΎΙζΡΎΘ§―ύ…Ϋ¥σ―ßΫΧ ΎΜΤ’φΫΧ Ύ‘Ύ1991Ρξ―–÷Τ≥ωΈ“Ιζ**Χ®ΝυΉ‘”…Ε»≤ΔΝΣΜζΤς»Υ―υΜζ(ΆΦ1-5)Θ§‘Ύ1994Ρξ―–÷Τ≥ω“ΜΧ®»α–‘Ϋ¬Ν¥≤ΔΝΣ ΫΝυΉ‘”…Ε»ΜζΤς»ΥΈσ≤ν≤Ι≥ΞΤςΘ§‘Ύ1997Ρξ≥ωΑφΝΥΈ“Ιζ**≤ΩΙΊ”Ύ≤ΔΝΣΜζΤς»Υάμ¬έΦΑΦΦ θΒΡΉ®÷χΘ§2006Ρξ”÷≥ωΑφΝΥΓΕΗΏΒ»Ω’ΦδΜζΙΙ―ßΓΖΓΘ
ΜΤ’φΘ§Ρ–Θ§ΚΚΉεΘ§1936Ρξ2‘¬≥ω…ζΘ§Ϋ≠Υ’“Υ–Υ»ΥΘ§ΫΧ ΎΘ§1959Ρξ±œ“Β”ΎΙΰΕϊ±θΙΛ“Β¥σ―ßΜζ–ΒΙΛ“’Ή®“ΒΘ§œ÷»Έ―ύ…Ϋ¥σ―ßΫΧ Ύ,≤© Ω…ζΒΦ ΠΓΘ
Υϊ «Έ“Ιζ**‘γΒΡ“ΜΈΜ¥” ¬≤ΔΝΣΜζΤς»Υ―–ΨΩΒΡ―ß’ΏΘ§“≤ «ΗΟΝλ”ρΒΡ****ΒΡ―ß’ΏΓΘΥϊΕύ¥Έ≤ΈΦ”ΙζΦ ―ß θΜνΕ·Θ§‘ΎΙζΦ …œ“―”–Ϋœ¥σΒΡ”ΑœλΘ§ΧΊ±π «‘Ύ2004ΡξΨΌ––”–44ΗωΙζΦ“500ΕύΟϊ―ß’Ώ≤ΈΦ”ΒΡΙζΦ ΜζΤςΚΆΜζΙΙ―ß―ßΜαΙζΦ ―ß θΡξΜαΒΎ11Ϋλ¥σΜα…œΘ§ΥϊΈΣ6Ηω÷––ΡΖΔ―‘»Υ÷°“ΜΓΘ
Υϊ÷ς“Σ¥” ¬ΜζΤς»Υ―ßΓΔΚΆ≤ΔΝΣΜζΤς»ΥΜζ–Β―ßΒ»ΖΫΟφΒΡ―–ΨΩΙΛΉςΓΘΕύΡξά¥Θ§œ»Κσ≥–ΒΘΙζΦ“Ή‘»ΜΩΤ―ßΜυΫπœνΡΩ9œνΘ§ΙζΦ“863œνΡΩ3œνΘ§ΙζΦ“ΩΤΦΦΙΞΙΊΒ»œνΡΩΙ≤ΦΤ20”ύœνΓΘ“―‘ΎΙζΡΎΆβΖΔ±μ¬έΈΡ280”ύΤΣΘ§Τδ÷–ΙζΦ **‘”÷ΨΓΕMechanism and Machine TheoryΓΖΓΔΓΕInternational Journal of Robotics ResearchΓΖ, ΓΕJournal of Robotic SystemsΓΖΘ§ΓΕASME Journal of Mechanical DesignΓΖΖΔ±μ30”ύΤΣΘΜASMEΓΔIEEEΒ»ΙζΦ Μα“ιΖΔ±μ¬έΈΡ50”ύΤΣΘΜΓΕ÷–ΙζΩΤ―ßΓΖΦΑΙζΡΎ“ΜΦΕ―ß θ‘”÷ΨΓΕΜζ–ΒΙΛ≥Χ―ß±®ΓΖΓΔΓΕ÷–ΙζΜζ–ΒΙΛ≥ΧΓΖΓΔΒ»ΖΔ±μ¬έΈΡ40”ύΤΣΓΘΤδ÷–129ΤΣ¥Έ±Μ»ΐ¥σΥς“ΐΘ®SCIΘ≠33ΓΔEIΘ≠88ΚΆISTPΘ≠8Θ© ’¬ΦΘ§Υϊ“ΐΉήΙ≤369¥ΈΓΘ≥ωΑφΉ®÷χΓΕΩ’ΦδΜζΙΙ―ßΓΖΘ®1991ΡξΘ©ΚΆΓΕ≤ΔΝΣΜζΤς»ΥΜζΙΙ―ßάμ¬έΦΑΩΊ÷ΤΓΖΘ®1997ΡξΘ©Θ§Κσ’Ώ±Μ…σΕ®ΈΣ“»ΪΙζΗΏΦΦ θ÷ΊΒψΆΦ ι”ΓΘΫώΡξΥϊΒΡΉ®÷χΓΕΗΏΒ»Ω’ΦδΜζΙΙ―ßΓΖ”÷±ΜΫΧ”ΐ≤Ω…σΕ®ΈΣ»ΪΙζ―–ΨΩ…ζ÷ΗΕ®ΫΧ≤ΡΘ§“―”Ύ2006Ρξ6‘¬≥ωΑφΓΘ
ΥϊΒΡ―–ΨΩ≥…Ιϊ“―ΜώΙζΦ“ΫΧ”ΐ≤ΩΩΤΉ‘»ΜΩΤ―ß1Β»Ϋ±2œνΘ§Κ”±± ΓΩΤΦΦΫχ≤Ϋ1Β»Ϋ±2œνΒ»ΩΤΦΦΫ±άχΙ≤ΦΤ16œνΓΘΡΩ«ΑΘ§ΉςΈΣΩΈΧβ÷ς“ΣΗΚ‘π»Υ÷ς≥÷ΙζΦ“Ή‘»ΜΩΤ―ßΜυΫπΒ»œνΡΩ2œνΦΑΚ”±± ΓΗΏ≤ψ¥ΈΧΊ±π”≈–ψ»Υ≤≈÷ß≥÷ΦΤΜ°ΓΘ
ΜΤ’φΫΧ Ύ÷Έ―ß―œΫςΓΔ÷Σ Ε‘®≤©ΓΔΜε»Υ≤ΜΨκΘ§÷±ΒΫœ÷‘ΎΒΡΫϋ70ΥξΒΡΗΏΝδ»‘Ψ…Ζή’Ϋ‘ΎΩΤ―ß―–ΨΩΒΡ**œΏΓΘΜΤ’φΫΧ Ύ‘ΎΙΛΉς÷–ΥϊΕύ¥Έ ήΒΫΒ≥ΚΆ’ΰΗ°ΒΡ±μ’ΟΘ§Εύ¥Έ±ΜΤάΈΣ ΓΙή”≈–ψ**ΓΘ≤ΔΕύ¥ΈΜώ«ΊΜ ΒΚ –άΆΕ·ΡΘΖΕΓΔΚ”±± ΓάΆΕ·ΡΘΖΕΚΆ‘≠Μζ–ΒΙΛ“Β≤ΩάΆΕ·ΡΘΖΕΒ»Ιβ»Ό≥ΤΚ≈ΓΘ
ΝυΉ‘”…Ε»ΜζΤς»ΥΈσ≤ν≤Ι≥ΞΤς
œύΙΊάμ¬έ
¬ί–ΐάμ¬έ
4≤ΔΝΣΜζΙΙΒΡ≥ωœ÷Ω…“‘ΜΊΥί÷Ν20 άΦΆ30Ρξ¥ζΓΘ
1931ΡξΘ§Gwinnett‘ΎΤδΉ®άϊ÷–Χα≥ωΝΥ“Μ÷÷Μυ”Ύ«ρΟφ≤ΔΝΣΜζΙΙΒΡ”ιά÷ΉΑ÷ΟΘ®ΆΦ1Θ©ΘΜ1940ΡξΘ§Pollard‘ΎΤδΉ®άϊ÷–Χα≥ωΝΥ“Μ÷÷Ω’ΦδΙΛ“Β≤ΔΝΣΜζΙΙΘ§”Ο”ΎΤϊ≥ΒΒΡ≈γΤαΘ®ΆΦ2Θ©ΘΜ÷°ΚσΘ§Gough‘Ύ1962ΡξΖΔΟςΝΥ“Μ÷÷Μυ”Ύ≤ΔΝΣΜζΙΙΒΡΝυΉ‘”…Ε»¬÷ΧΞΦλ≤βΉΑ÷ΟΘ®ΆΦ3Θ©ΘΜ»ΐΡξΚσΘ§Stewart Ή¥ΈΕ‘GoughΖΔΟςΒΡ’β÷÷ΜζΙΙΫχ––ΝΥΜζΙΙ―ß“β“ε…œΒΡ―–ΨΩΘ§≤ΔΫΪΤδΆΤΙψ”Π”ΟΈΣΖ…––ΡΘΡβΤςΒΡ‘ΥΕ·≤ζ…ζΉΑ÷ΟΘ§’β÷÷ΜζΙΙ“≤ «ΡΩ«Α”Π”Ο**ΙψΒΡ≤ΔΝΣΜζΙΙΘ§±Μ≥ΤΈΣGough-StewartΜζΙΙΜρStewartΜζΙΙ
”Π”ΟΖΫΟφΘΚ
Θ®1Θ©‘ΥΕ·ΡΘΡβΤς
≤®“τ737-400Ζ…––ΡΘΡβΤς CAE Ζ…––ΡΘΡβΤς
Θ®2Θ©≤ΔΝΣΜζ¥≤
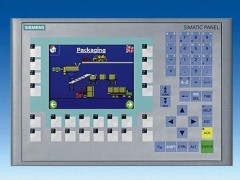
Θ®3Θ©ΈΔ≤ΌΉςΜζΤς»Υ
Θ®4Θ©ΝΠ¥ΪΗ–Τς
ΤδΥϊΘΚΨϋ ¬Νλ”ρ÷–ΒΡ«±ΆßΓΔΧΙΩΥΦί Μ‘ΥΕ·ΡΘΡβΤςΘ§œ¬“Μ¥ζ’ΫΕΖΜζΒΡ ΗΝΩ≈γΙήΓΔ«±ΆßΦΑΩ’ΦδΖ…––ΤςΒΡΕ‘Ϋ”ΉΑ÷ΟΓΔΉΥΧ§ΩΊ÷ΤΤςΒ»ΘΜ…ζΈο“Ϋ―ßΙΛ≥Χ÷–ΒΡœΗΑϊ≤ΌΉςΜζΤς»ΥΓΔΩ… Βœ÷œΗΑϊΒΡΉΔ…δΚΆΖ÷ΗνΘΜΈΔΆβΩΤ ÷ θΜζΤς»ΥΘΜ¥σ–Ά…δΒγΧλΈΡΆϊ‘ΕΨΒΒΡΉΥΧ§Βς’ϊΉΑ÷ΟΘΜΜλΝΣΉΑ±ΗΒ»Θ§»γSMTΙΪΥΨΒΡTriceptΜλΝΣΜζ–Β ÷ΡΘΩι «Μυ”Ύ≤ΔΝΣΜζΙΙΒΞ‘ΣΒΡΡΘΩιΜ·…ηΦΤΒΡ≥…ΙΠΒδΖΕΓΘ
5≤ΔΝΣΜζΙΙ±ύΦ≠Χα≥ωΓΔΧΊΒψΦΑ”Π”Ο
1965 ΡξΘ§Β¬ΙζStewart ΖΔΟςΝΥΝυΉ‘”…Ε»≤ΔΝΣΜζΙΙΘ§≤ΔΉςΈΣΖ…––ΡΘΡβΤς”Ο”Ύ―ΒΝΖΖ…––‘±ΓΘ1978ΡξΑΡ¥σάϊ―«**ΜζΙΙ―ßΫΧ ΎHuntΧα≥ωΫΪ≤ΔΝΣΜζΙΙ”Ο”ΎΜζΤς»Υ ÷±έΓΘ
≤ΔΝΣΜζΙΙΒΡΧΊΒψΘΚ
Θ®1Θ©”κ¥°ΝΣΜζΙΙœύ±»Η’Ε»¥σΘ§ΫαΙΙΈ»Ε®ΘΜ
Θ®2Θ©≥–‘ΊΡήΝΠ¥σ;
Θ®3Θ©ΈΔΕ·ΨΪΕ»ΗΏ;
Θ®4Θ©‘ΥΕ·ΗΚΚ…–Γ;
Θ®5Θ©‘ΎΈΜ÷Ο«σΫβ…œΘ§¥°ΝΣΜζΙΙ’ΐΫβ»ί“ΉΘ§ΒΪΖ¥Ϋβ °Ζ÷άßΡ―Θ§Εχ≤ΔΝΣΜζΙΙ’ΐΫβάßΡ―Ζ¥Ϋ⻥ƫ≥Θ»ί“ΉΓΘ
”…”ΎΜζΤς»Υ‘ΎœΏ Β ±ΦΤΥψ «“ΣΦΤΥψΖ¥ΫβΒΡΘ§’βΕ‘¥°ΝΣ Ϋ °Ζ÷≤ΜάϊΘ§Εχ≤ΔΝΣ Ϋ»¥»ί“Ή Βœ÷ΓΘ
Ζ÷άύ
¥”‘ΥΕ·–Έ Ϋά¥Ω¥Θ§≤ΔΝΣΜζΙΙΩ…Ζ÷ΈΣΤΫΟφΜζΙΙΚΆΩ’ΦδΜζΙΙΘΜœΗΖ÷Ω…Ζ÷ΈΣΤΫΟφ“ΤΕ·ΜζΙΙΓΔΤΫΟφ“ΤΕ·ΉΣΕ·ΜζΙΙΓΔΩ’Φδ¥Ω“ΤΕ·ΜζΙΙΓΔΩ’Φδ¥ΩΉΣΕ·ΜζΙΙΚΆΩ’ΦδΜλΚœ‘ΥΕ·ΜζΙΙ,
ΝμΩ…Α¥≤ΔΝΣΜζΙΙΒΡΉ‘”…Ε» ΐΖ÷άύΘΚ
Θ®1 Θ©2 Ή‘”…Ε»≤ΔΝΣΜζΙΙΓΘ
2 Ή‘”…Ε»≤ΔΝΣΜζΙΙΘ§»γ5-RΓΔ3-R-2-PΘ®R ±μ ΨΉΣΕ·Η±Θ§P ±μ Ψ“ΤΕ·Η±Θ©ΤΫΟφ5ΗΥΜζΙΙ «**Βδ–ΆΒΡ2Ή‘”…Ε»≤ΔΝΣΜζΙΙΘ§’βάύΜζΙΙ“ΜΑψΨΏ”–2 Ηω“ΤΕ·‘ΥΕ·ΓΘ
Θ®2 Θ©3 Ή‘”…Ε»≤ΔΝΣΜζΙΙΓΘ
3 Ή‘”…Ε»≤ΔΝΣΜζΙΙΗςάύΫœΕύΘ§–Έ ΫΫœΗ¥‘”Θ§“ΜΑψ”–“‘œ¬–Έ ΫΘΚΤΫΟφ3Ή‘”…Ε»≤ΔΝΣΜζΙΙΘ§»γ3-RRR ΜζΙΙΓΔ3-RPR ΜζΙΙΘ§ΥϋΟ«ΨΏ”–2Ηω“ΤΕ·ΚΆ“ΜΗωΉΣΕ·ΘΜ«ρΟφ3Ή‘”…Ε»≤ΔΝΣΜζΙΙΘ§»γ3-RRR «ρΟφΜζΙΙΓΔ3-UPS-1-S «ρΟφΜζΙΙΘ§3-RRR «ρΟφΜζΙΙΥυ”–‘ΥΕ·Η±ΒΡ÷αœΏΜψΫΜΩ’Φδ“ΜΒψΘ§’βΒψ≥ΤΈΣΜζΙΙΒΡ÷––ΡΘ§Εχ3-UPS-1-S «ρΟφΜζΙΙ‘ρ“‘SΒΡ÷––ΡΒψΈΣΜζΙΙΒΡ÷––ΡΘ§ΜζΙΙ…œΒΡΥυ”–ΒψΒΡ‘ΥΕ·ΕΦ «»ΤΗΟΒψΒΡΉΣΕ·‘ΥΕ·ΘΜ3 Έ§¥Ω“ΤΕ·ΜζΙΙΘ§»γStar Like ≤ΔΝΣΜζΙΙΓΔTsai ≤ΔΝΣΜζΙΙΚΆDELTA ΜζΙΙΘ§ΗΟάύΜζΙΙΒΡ‘ΥΕ·―ß’ΐΖ¥ΫβΕΦΚήΦρΒΞΘ§ «“Μ÷÷”Π”ΟΚήΙψΖΚΒΡ3Έ§“ΤΕ·Ω’ΦδΜζΙΙΘΜΩ’Φδ3Ή‘”…Ε»≤ΔΝΣΜζΙΙΘ§»γΒδ–ΆΒΡ3-RPS ΜζΙΙΘ§’βάύΜζΙΙ τ”Ύ«Ζ÷»ΜζΙΙΘ§‘ΎΙΛΉςΩ’ΦδΡΎ≤ΜΆ§ΒΡΒψΤδ‘ΥΕ·–Έ Ϋ≤ΜΆ§ «Τδ**œ‘÷χΒΡΧΊΒψΘ§”…”Ύ’β÷÷ΧΊ βΒΡ‘ΥΕ·ΧΊ–‘Θ§ΉηΑ≠ΝΥΗΟάύΜζΙΙ‘Ύ ΒΦ ÷–ΒΡΙψΖΚ”Π”ΟΘΜΜΙ”–“Μάύ «‘ωΦ”Η®÷ζΗΥΦΰΚΆ‘ΥΕ·Η±ΒΡΩ’ΦδΜζΙΙΘ§»γΒ¬ΙζΚΚ≈ΒΆΰ¥σ―ß―–÷ΤΒΡ≤ΔΝΣΜζ¥≤≤…”ΟΒΡ3-UPS-1-PU «ρΉχ±ξ Ϋ3 Ή‘”…Ε»≤ΔΝΣΜζΙΙΘ§”…”ΎΗ®÷ζΗΥΦΰΚΆ‘ΥΕ·Η±ΒΡ÷Τ‘ΦΘ§ ΙΒΟΗΟΜζΙΙΒΡ‘ΥΕ·ΤΫΧ®ΨΏ”–1 Ηω“ΤΕ·ΚΆ2 ΗωΉΣΕ·ΒΡ‘ΥΕ·Θ®“≤Ω…“‘ΥΒ «3Ηω“ΤΕ·‘ΥΕ·Θ©ΓΘ
Θ®3 Θ©4 Ή‘”…Ε»≤ΔΝΣΜζΙΙΓΘ
4 Ή‘”…Ε»≤ΔΝΣΜζΙΙ¥σΕύ≤Μ «Άξ»Ϊ≤ΔΝΣΜζΙΙΘ§»γ2-UPS-1-RRRR ΜζΙΙΘ§‘ΥΕ·ΤΫΧ®Ά®Ιΐ3 Ηω÷ßΝ¥”κΕ®ΤΫΧ®œύΝ§Θ§”–2Ηω‘ΥΕ·Ν¥ «œύΆ§ΒΡΘ§ΗςΨΏ”–1 ΗωΜΔΩΥΫ¬U Θ§1 Ηω“ΤΕ·Η±P Θ§Τδ÷–P ΚΆ1 ΗωR ««ΐΕ·Η±Θ§“ρ¥Υ’β÷÷ΜζΙΙ≤Μ «Άξ»Ϊ≤ΔΝΣΜζΙΙΓΘ
Θ®4 Θ©5 Ή‘”…Ε»≤ΔΝΣΜζΙΙΓΘ
œ÷”–ΒΡ5 Ή‘”…Ε»≤ΔΝΣΜζΙΙΫαΙΙΗ¥‘”Θ§»γΚΪΙζLeeΒΡ5Ή‘”…Ε»≤ΔΝΣΜζΙΙΨΏ”–ΥΪ≤ψΫαΙΙΘ®2 Ηω≤ΔΝΣΜζΙΙΒΡΫαΚœΘ©ΓΘ
Θ®5 Θ©6 Ή‘”…Ε»≤ΔΝΣΜζΙΙΓΘ
6 Ή‘”…Ε»≤ΔΝΣΜζΙΙ «≤ΔΝΣΜζΤς»ΥΜζΙΙ÷–ΒΡ“Μ¥σάύΘ§ «ΙζΡΎΆβ―ß’Ώ―–ΨΩΒΟ**ΕύΒΡ≤ΔΝΣΜζΙΙΘ§ΙψΖΚ”Π”Ο‘ΎΖ…––ΡΘΡβΤςΓΔ6Έ§ΝΠ”κΝΠΨΊ¥ΪΗ–ΤςΚΆ≤ΔΝΣΜζ¥≤Β»Νλ”ρΓΘΒΪ’βάύΜζΙΙ”–ΚήΕύΙΊΦϋ–‘ΦΦ θΟΜ”–ΜρΟΜ”–Άξ»ΪΒΟΒΫΫβΨωΘ§±»»γΤδ‘ΥΕ·―ß’ΐΫβΓΔΕ·ΝΠ―ßΡΘ–ΆΒΡΫ®ΝΔ“‘ΦΑ≤ΔΝΣΜζ¥≤ΒΡΨΪΕ»±ξΕ®Β»ΓΘ¥”Άξ»Ϊ≤ΔΝΣΒΡΫ«Ε»≥ωΖΔΘ§’βάύΜζΙΙ±Ί–κΨΏ”–6Ηω‘ΥΕ·Ν¥ΓΘΒΪœ÷”–ΒΡ≤ΔΝΣΜζΙΙ÷–Θ§“≤”–”Β”–3 Ηω‘ΥΕ·Ν¥ΒΡ6 Ή‘”…Ε»≤ΔΝΣΜζΙΙΘ§»γ3-PRPS ΚΆ3-URS Β»ΜζΙΙΘ§ΜΙ”–‘Ύ3 ΗωΖ÷÷ßΒΡΟΩΗωΖ÷÷ß…œΗΫΦ”1Ηω5ΗΥΜζΙΙΉς’β«ΐΕ·ΜζΙΙΒΡ6Ή‘”…Ε»≤ΔΝΣΜζΙΙΒ»ΓΘ

